一、实验室简介
面向无人机的实际应用需求,开展无人系统建模与控制技术、多无人机协同管控技术、多无人机协同定位与导航技术的相关研究,并积极推动无人机智能管控技术的创新实践,培养学生的学习能力、思考能力和创新能力,积极参加国内外相关比赛。
二、指导教师
序号 | 姓名 | 学历 | 职称 | 研究方向 |
1 | 陈伟 | 博士 | 讲师 | 多智能体协同控制、优化与决策 |
2 | 赵婧 | 博士 | 讲师 | 智能安全管控技术 |
3 | 刘子悦 | 博士 | 讲师 | 新一代通信技术 |
4 | 汤广富 | 博士 | 讲师 | 数字通信技术 |
三、主要研究方向及内容
1、无人机建模、仿真与控制技术
无人机是一种具有高度复杂性的技术设备,高精度模型构建对控制系统设计有较大影响。飞思无人系统仿真开发平台具有全数字系统设计、软件在换仿真、硬件在换仿真等功能,支持多旋翼、固定翼、无人车、垂直起降飞行器(VTOL)等多种机型,能够有效支撑无人机模型设计、控制算法开发与验证。
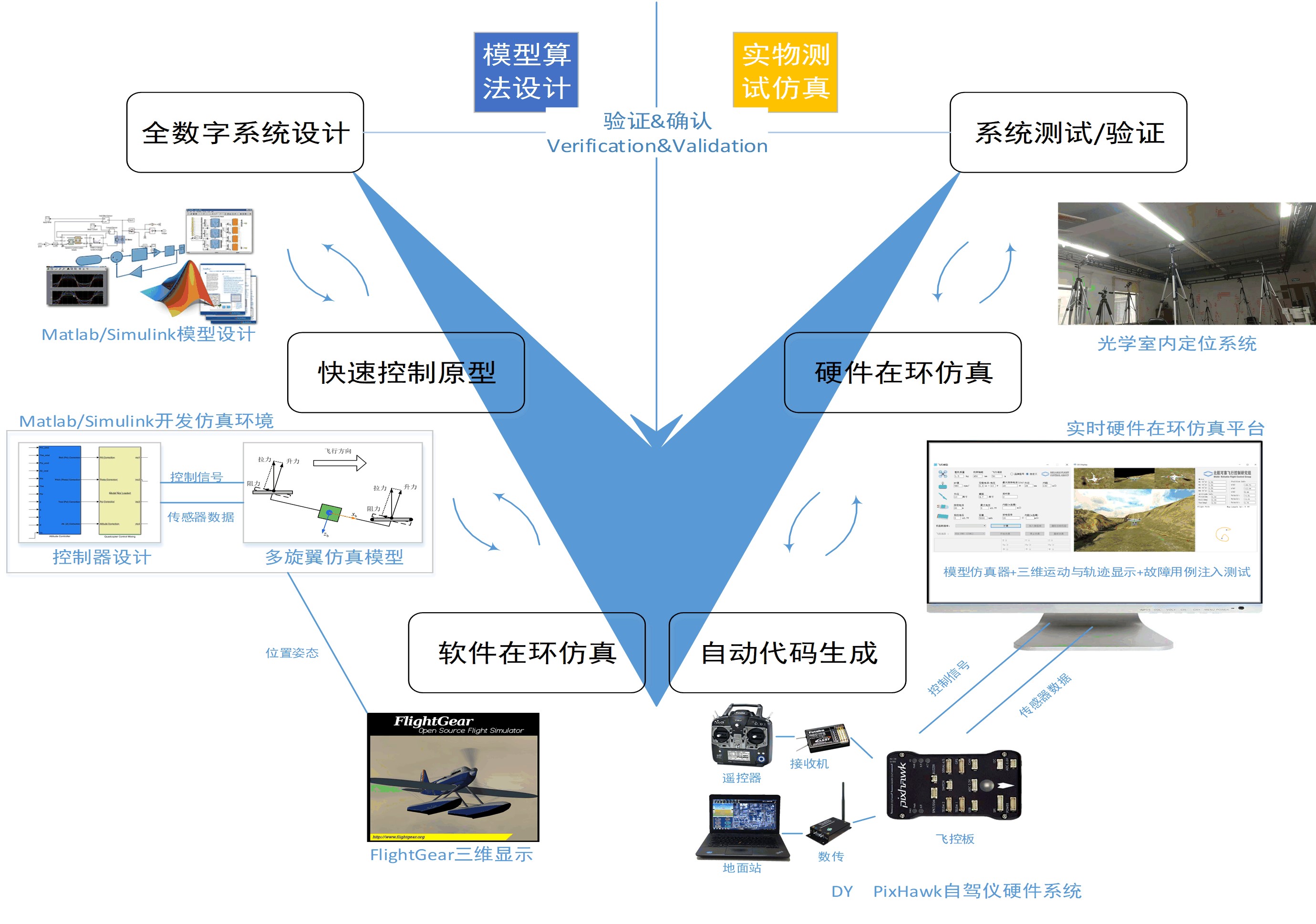
图 1无人机一体化仿真设计
2、多无人机协同控制技术
无人机协同控制技术,是面向智能交通、应急救灾等实际应用需求,开展协同任务规划技术、智能航路规划技术、自主防相撞决策技术、编队阵型控制技术等相关研究。飞思无人系统仿真开发平台具有分布式架构,能够支撑大规模集群仿真实验,并通过代码自动生成实现无人机集群实物测试。

图 2无人机集群控制系统
3、多无人机协同定位与导航技术
无人机协同定位与仿真技术,是无人机实际应用的基础。实验室建设有完善的超宽带定位系统,能够实现无人机室内飞行时的精准定位、轨迹跟踪等功能,并可通过通信信号处理相关技术提升定位精度。同时,开展基于视觉的室内地图构建技术研究,实现高精度室内定位、导航与避障。
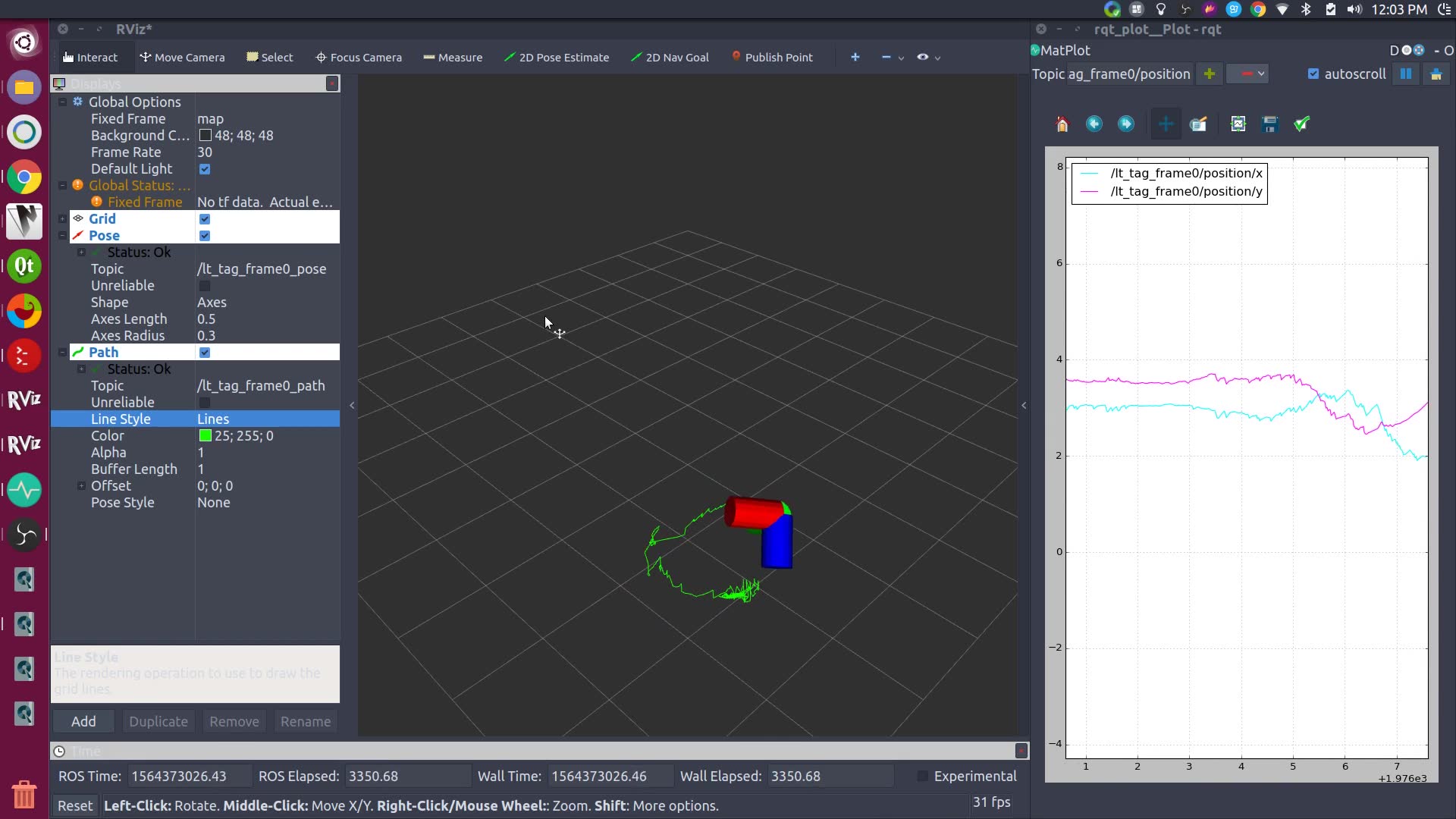
图 3超宽带定位系统
四、团队成员
序号 | 姓名 | 年级 | 序号 | 姓名 | 年级 |
1 | 陶银志 | 2018 | 8 | 杨宗洁 | 2019 |
2 | 李斌 | 2018 | 9 | 文禹尧 | 2019 |
3 | 来佳音 | 2018 | 10 | 龙帅 | 2019 |
4 | 王星宇 | 2018 | 11 | 曾潘 | 2019 |
5 | 王南川 | 2018 | 12 | 商峻源 | 2019 |
6 | 刘琮晟 | 2019 | 13 | 杜博汶 | 2019 |
7 | 刘劭宇 | 2019 |